
南極地域観測隊の海洋観測チームは、南極の氷床がどのような仕組みで融解しているのかを研究しています。大陸から張り出した氷床末端部と海が接する場所で、氷が海水によってどのように融けているのかを知るためには、その現場となる氷の底(裏)を知る必要があります。ただし、電波の届かない氷の下の海底地形や海の性質は衛星観測で調べることができません。そこで、氷の下に入り込むことができるAUV(Autonomous underwater vehicle:自律型水中ロボット)を使い、氷の下の海流や温度、塩分などを観測しようとしています。
MONACA(Mobility Oriented Nadir AntarctiC Adventurer:モナカ)と名付けられたこのAUVは、2017年から開発が始まり、2023年にはリュツォ・ホルム湾内に停泊している「しらせ」から日本初の南極海でのAUVの走行を成し遂げています。ただ、当時は通信ケーブルをMONACA本体につないだままの走行だったため、今回はケーブルを外して完全に自律走行させることが大きな目的でした。
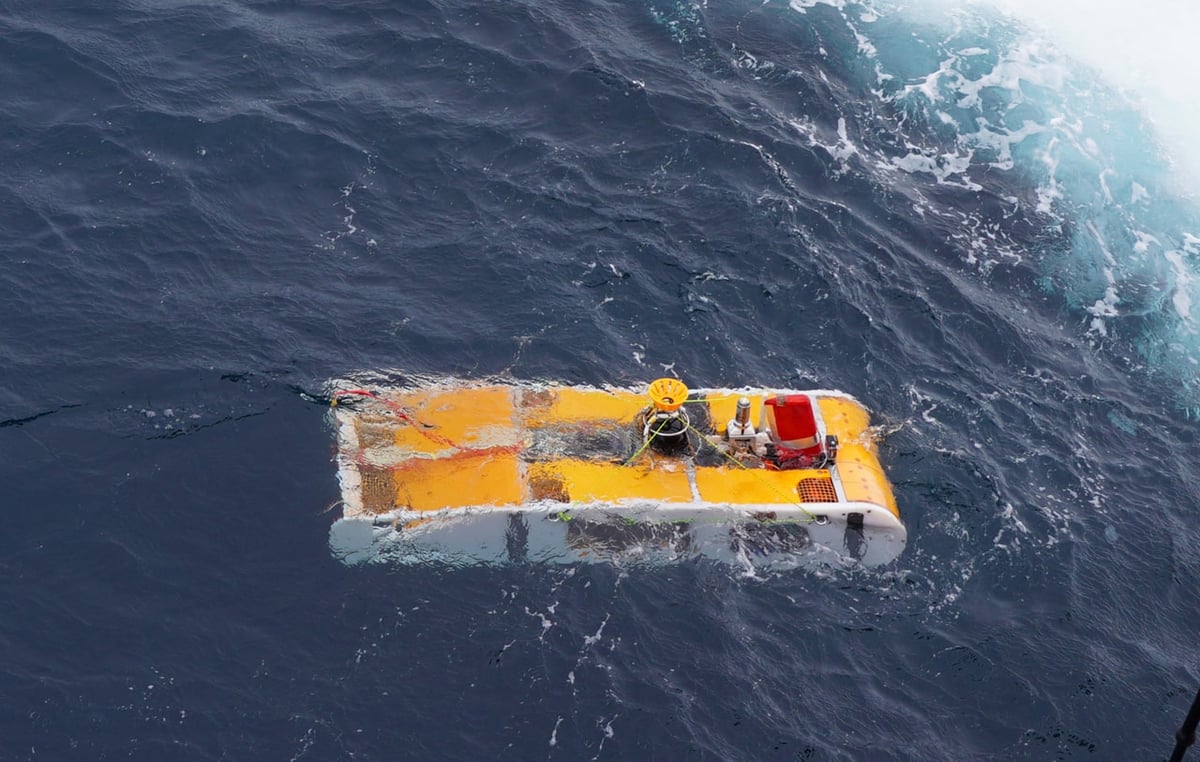
2025年2月8日。この日までに10回ほどの試験走行を重ね、ついに本番を迎えました。風が強く厳しい海洋状況でしたが、「しらせ」乗員の協力のもと、MONACAからケーブルを外し、自律走行を実施。見事、水深約20m、「しらせ」から約100mの距離を往復させることに成功しました。南極海での完全自律走行を国産のAUVで達成できたことは大きな成果となります。「しらせ」船内で「MONACA任務達成!」の放送が流れると一斉に大きな拍手が送られました。
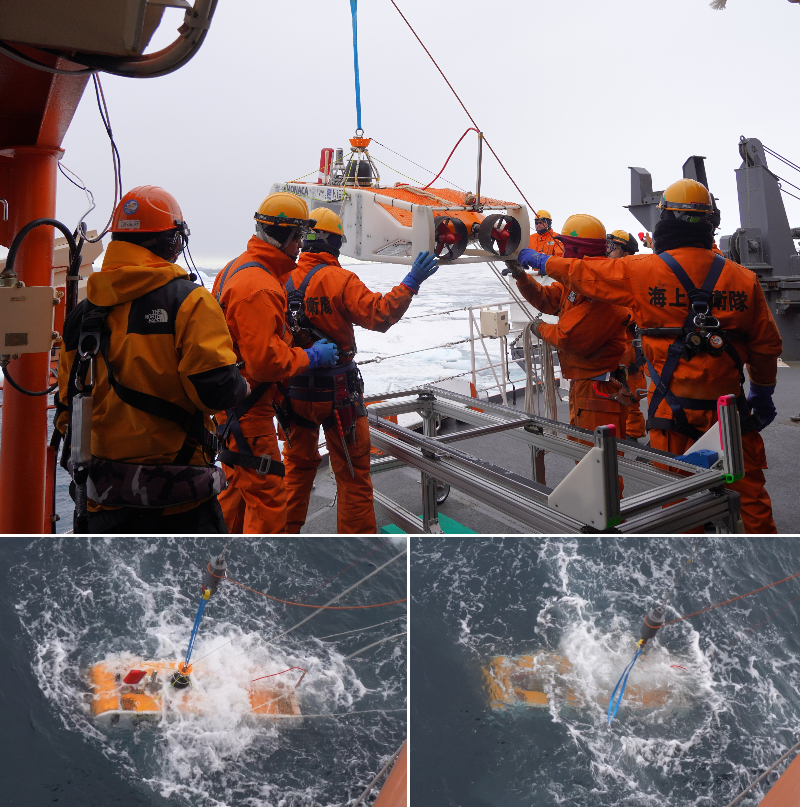
撮影:JARE66 北本 憲央(2025年2月8日)

撮影:JARE66 北本 憲央(2025年2月8日)

撮影:JARE66 北本 憲央(2025年2月8日)
撮影:JARE66 北本 憲央(2025年2月8日)

撮影:JARE66 北本 憲央(2025年2月8日)

撮影:JARE66 北本 憲央(2025年2月8日)
MONACA開発者の山縣隊員は「64次にできなかったことが、今回無事に達成できほっとした。いろいろな方にようやく恩を返すことができた。次はもっと遠くまで走らせたい」と語りました。次はいよいよ、最大の目的であるトッテン氷河沖での走行となります。
MONACAに関するより詳しい内容はこちらをご覧ください。
「水中ロボット「MONACA」、南極の海を潜る」https://kyoku.nipr.ac.jp/special/1897

撮影:JARE66 北本 憲央(2025年2月8日)
(JARE66 北本憲央)