
「しらせ」の観測甲板を歩いていると、コンテナラボがオープンしていました。64次隊では、リュツォ・ホルム湾で自律型水中ロボット「MONACA」を航行させ、海氷下にある海底の地形や海氷の構造を下面から調べることを計画しています。これまで調べられていない氷海域の海底地形や海氷に取り込まれた物質を明らかにすることが期待されています。

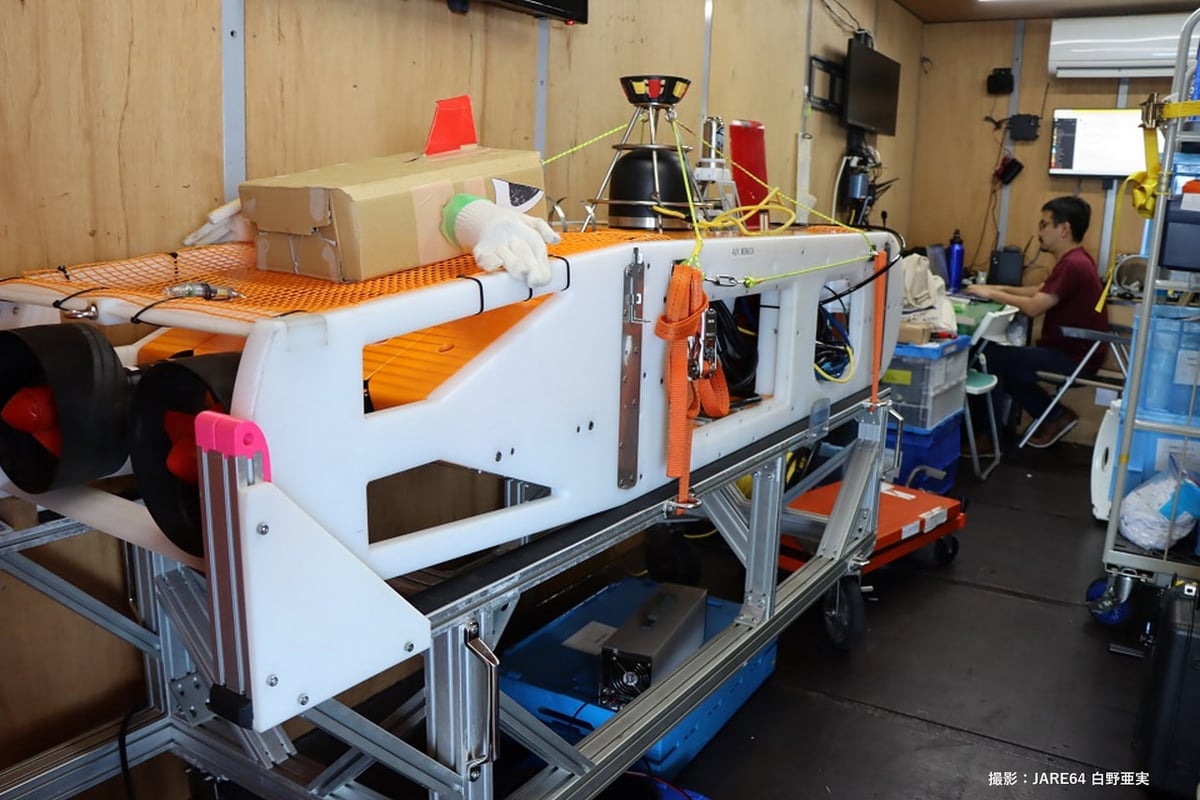

(JARE64白野亜実)
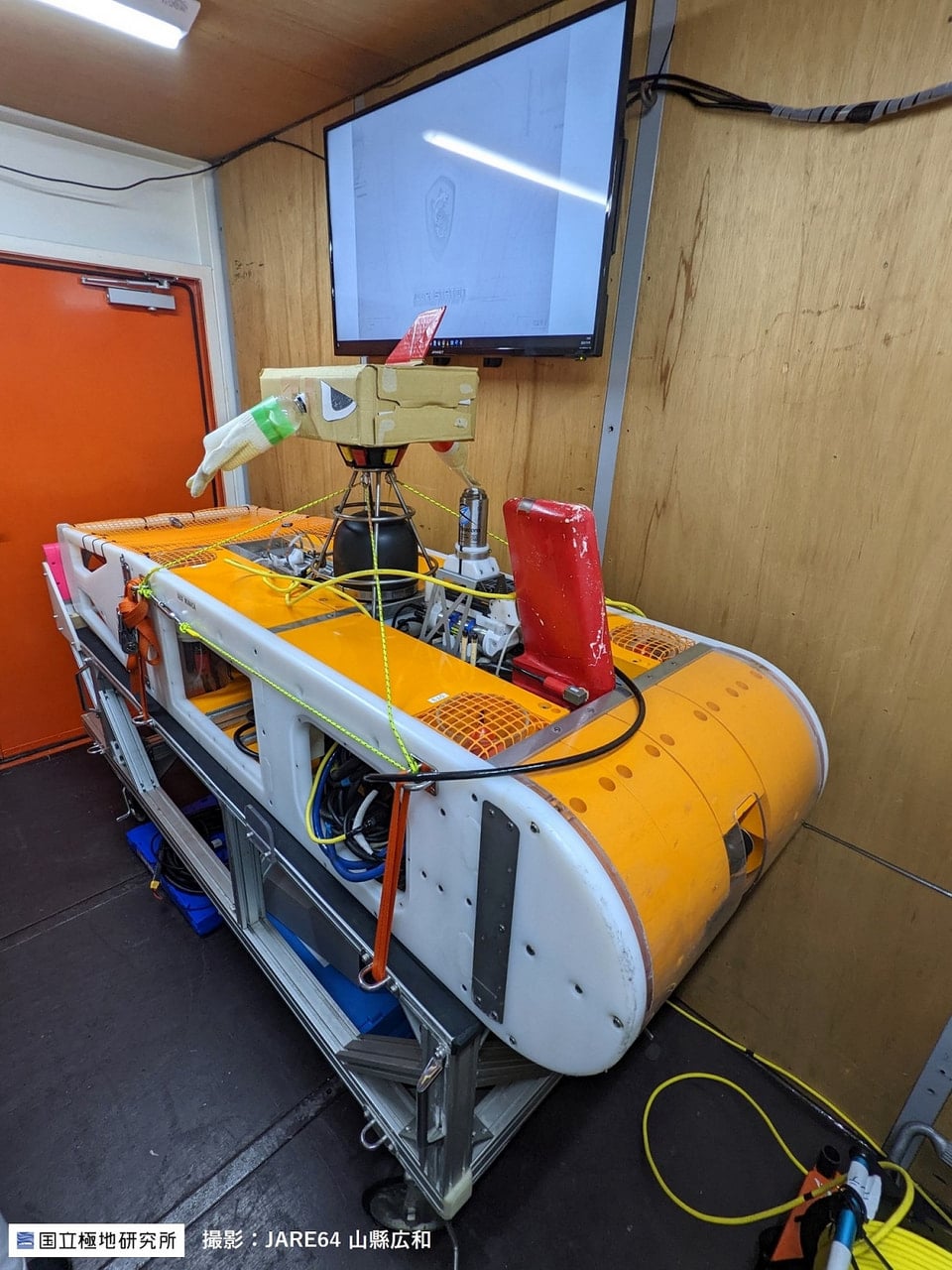
「しらせ」の観測甲板を歩いていると、コンテナラボがオープンしていました。64次隊では、リュツォ・ホルム湾で自律型水中ロボット「MONACA」を航行させ、海氷下にある海底の地形や海氷の構造を下面から調べることを計画しています。これまで調べられていない氷海域の海底地形や海氷に取り込まれた物質を明らかにすることが期待されています。
(JARE64白野亜実)