
「しらせ」は順調に南南西へ進んでいます。今日(3日)の深夜には乗船後初の時刻帯変更が予定されており、24時が同じ日の23時になります。1時間得をした気分です。
今日午前11時ごろ、オーストラリアのEEZ(排他的経済水域)を越えたところで、マルチビーム音響測深機(観測隊での通称は"マルチ")を使った海底地形調査が始まりました。
マルチは音の反射を使って海底の地形を調査する機器で、「しらせ」の船底に取り付けられています。海中で音波を出し、海底で音が跳ね返って船底に達するまでの秒数を測定することによって、水深、すなわち、海底の凸凹を測ることができます。
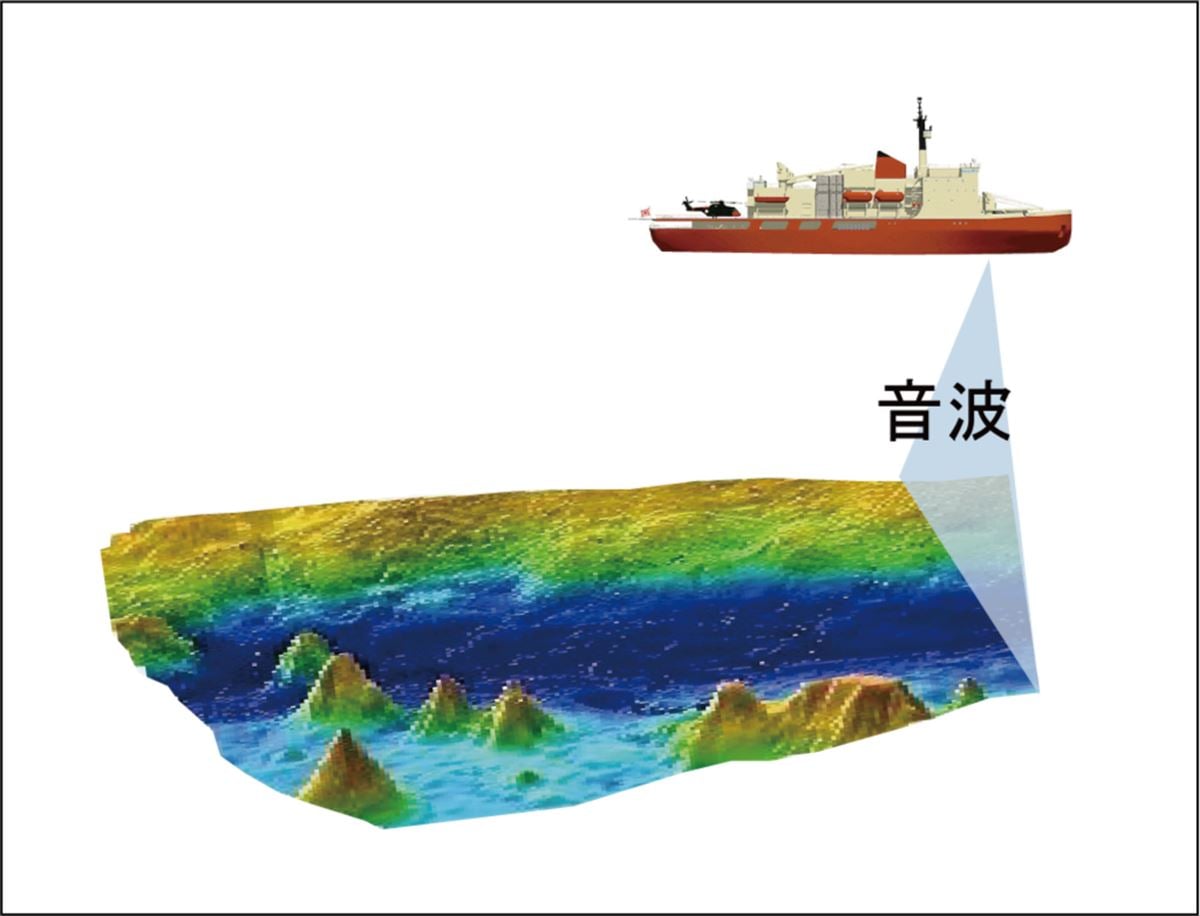
ただ、水中で音が伝わる速さは、海水の温度や塩分によって変化してしまいます。そこで、正しい水深を算出するために、XCTDという別の装置を海中に投下して水温や塩分を測定し、その値を使って、マルチの測定データを補正します。

撮影:JARE61 寺村たから、2019年12月3日
撮影:JARE61 寺村たから、2019年12月3日
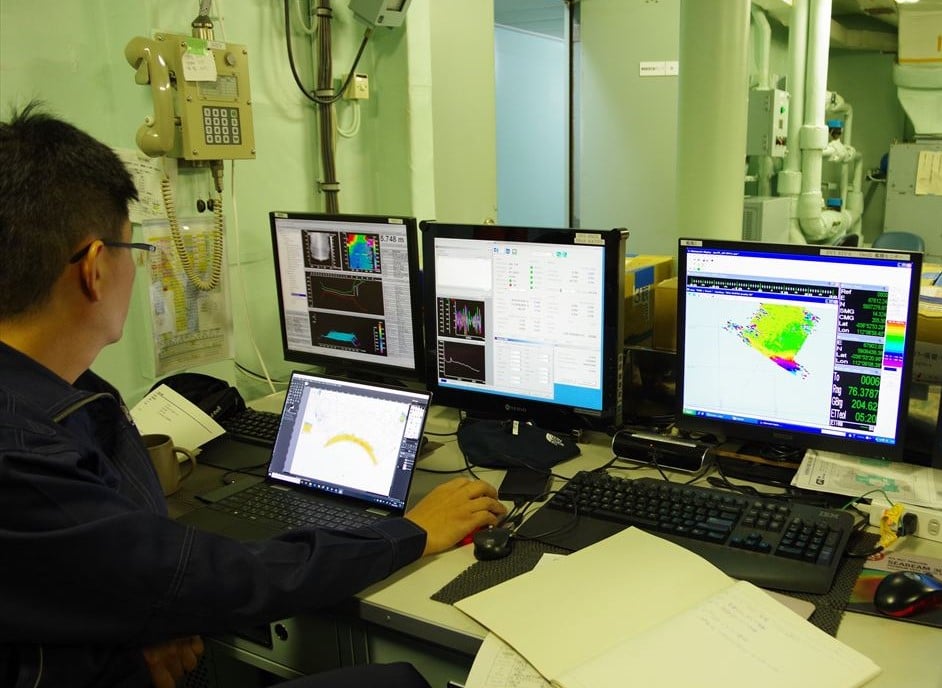
「しらせ」の第3観測室に設置されたモニターには、測定の進行に合わせて海底の地形が表示されていきました。
無事に観測を開始できたことで、海底地形調査を担当する池内 柚か愛(いけうち ゆかを)隊員は、「ひと安心」と胸をなでおろしました。一方で、マルチの技術者である柴田 成晴(しばた みちはる)隊員は、「不安はなかった。早く始めたかった」と自信をのぞかせました。
この観測は往復路の航海で継続して実施され、1月下旬には昭和基地のあるリュツォ・ホルム湾で重点的に行われます。

撮影:JARE61 寺村たから、2019年12月3日
お ま け

撮影:しらせ乗組員
(JARE61 寺村たから)