
―3月15日、自律型水中ロボット「MONACA」の航行試験が行われました。67次行動では初回の無索航行後、浮上が確認できず一時行方不明となりましたが、投入から6日後の3月21日に回収することができました。本ブログは行方不明となった日から捜索・回収までの記録です。
3月15日、67次行動ではレグ2から始まった観測であるAUV「MONACA」の航行試験が行われました。
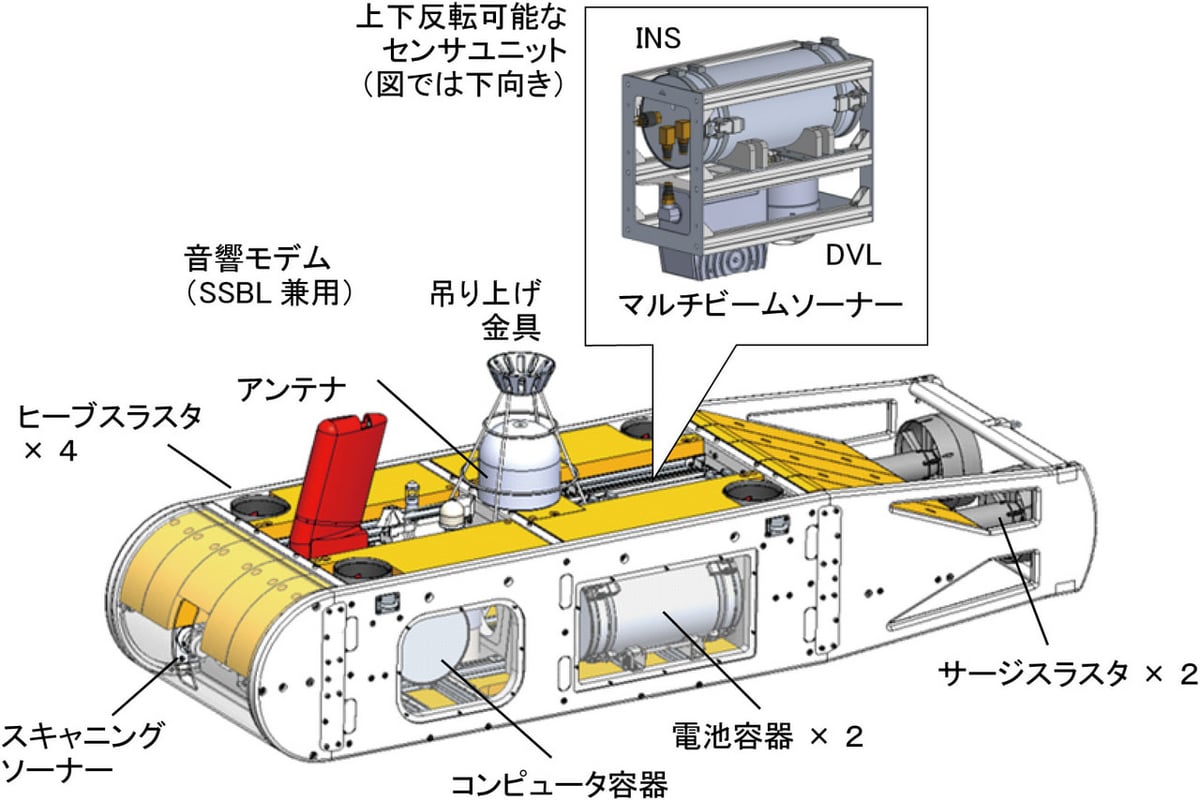
「MONACA」は、東京大学と国立極地研究所が共同開発した水中ロボットです。ケーブルを必要とし、人が操縦するROV※1とは異なり、ケーブル長の制約を受けない長距離航行が可能で、遠隔操作に頼らず周囲の環境をもとに自ら判断して行動するAUV※2に分類されます。中でも「MONACA」は、船では近づけない南極の海氷下や棚氷域を自在に探査するために開発された日本初の南極仕様のAUV(以後、MONACAと記載)。2017年に開発が始まり、これまでに南極海での航行を2シーズン達成してきました。
初回の64次では「しらせ」からの有索運用により、日本初となる南極海での自律航行を実現。昨年の66次ではケーブルを外し、リュツォ・ホルム湾およびトッテン氷河沖での無索運用に成功しています。今年はさらに航行距離を延ばし、計2kmの無索運用達成を目標としていました。
※1 遠隔操作型無人潜水機(Remotely Operated Vehicle)
※2 自律型無人潜水機(Autonomous Underwater Vehicle)
撮影:JARE67 池田未歩(2026年3月6日 )
運命の3月15日
午前中に有索(ケーブル有り)での動作確認を終え、午後から無索での航行試験が開始されました。MONACA観測支援のノウハウを持つ経験豊富なしらせ乗員の協力により揚収作業は驚くほどスムーズに進み、12:50頃ケーブルが外され自律航行がスタートします。
この日のミッションは、深度を変えながら500mの距離を2往復(500m×4)すること。一度航行が始まると船上でできることは限られますが、舷側に吊り下げた音響装置(SSBL)から得られる位置情報を頼りに、その動きを見守ります。

撮影:JARE67 池田未歩(2026年3月15日)

撮影:JARE67 池田未歩(2026年3月15日)
13:20頃、潮流の影響でやや流されつつもMONACAが最終の復路に入ったことが確認され、あとは浮上を待つのみとなりました。
しかし、音響装置の応答上はすでに浮上していてよい値が出ているにもかかわらず、いつまで待っても姿を確認することができません。実は想定以上の風と潮流により、開始時には十分距離のあった海氷群とMONACAが接近。MONACAは氷盤の下に浮上した可能性が高いことが明らかになりました。

撮影:JARE67 池田未歩(2026年3月15日)
現場が騒然としたのも束の間、MONACAチームの二人が音響装置からMONACAに「再潜航後、移動しながら再浮上」の指示を送ることを決断します。何度かのトライの末、命令を受け取り航行を再開したMONACA。しかし、その後も機体を視認することはできずもどかしい時間が続き、再び得られた音響反応から再浮上でもMONACAが海氷に捕捉されたことが判明しました。
MONACA自体のバッテリー残量はその時点で残り1,2時間ほど。絶望する間もなく即座に「しらせ」側の協力で船を移動させ、浮上予想位置周辺の氷を砕いて救出・または音響装置による再コンタクトを試みます。

撮影:JARE67 池田未歩(2026年3月15日)

撮影:JARE67 池田未歩(2026年3月15日 )
その後2回ほどMONACAから反応があったものの、水深や方位の情報を含まない弱々しい返事のみのような応答で位置の特定には至りません。この日の捜索は19時まで続けられましたが、MONACAを発見することはできませんでした。
一斉捜索
すでにバッテリーも切れてしまったと考えられる2日目。残っている手段は目視捜索と、本体とは別系統の電源で作動するイリジウムビーコンの反応を待つことです。後者はMONACAが海面に浮上した際にGPS位置を送信する仕組みですが、これまで反応がないことから今も氷盤の下にいると判断し、浮上予想位置周辺での一斉捜索が始まりました。

撮影:JARE67 池田未歩(2026年3月16-19日)
捜索は3日間、合計約14時間にわたって行われました。
一斉捜索最終日となった3月19日。この日も発見には至らず「MONACA捜索を終了する。ありがとう。」という艦橋からのアナウンスとともに、MONACA捜索が一時打ち切られました。
GPSが届いた!
3月20日深夜、事態は大きく動きます。何とMONACAからGPSの位置情報が届いたのです。最初に気づいたのはMONACAチームコパイロットの下野さんでした。GPSが届いたことは、MONACAが氷盤と思しき障害物を抜け、海面に浮上したことを意味しています。翌朝に観測隊と「しらせ」側の調整が行われ、MONACA救出に向けて針路をとることになりました。
3月21日8:00頃、艦橋にはMONACAチームリーダーの山縣さんのほか、双眼鏡を持った隊員やしらせ乗員が集結していました。

撮影:JARE67 池田未歩(2026年3月21日 )
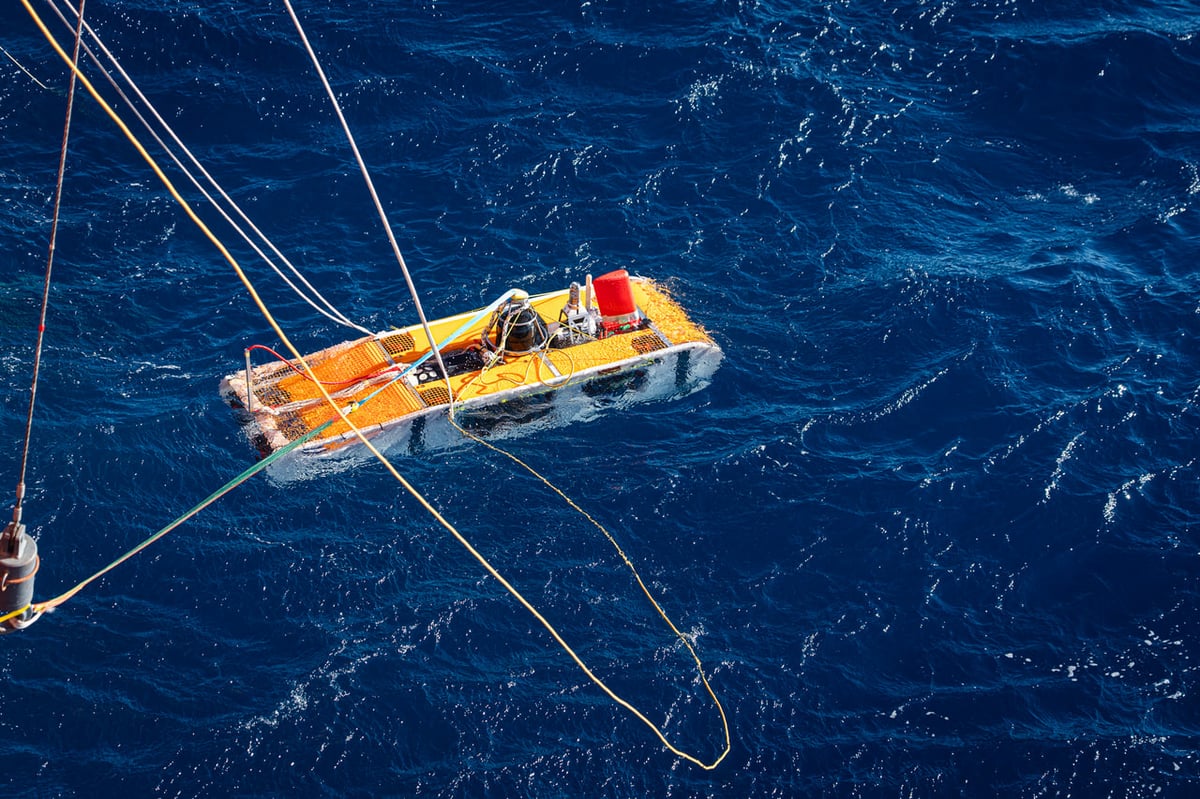
そして8:20頃、浮上予想位置まで残り約800mほどの距離で「あった!」と声が上がりました。瞬きをすれば見失いそうな小さな赤いアンテナ。紛れもなくMONACAです。

撮影:JARE67 池田未歩(2026年3月21日)
すぐに係留系や海底圧力計の回収オペレーションで培ったノウハウで作業が始まり、MONACAを無傷で回収することができました。

撮影:JARE67 池田未歩(2026年3月21日)

撮影:JARE67 池田未歩(2026年3月21日)
氷況や風、潮流といった外的要因が複雑に作用する中でMONACAがどのように挙動したのか。実運用環境でしか得られないデータを数多く取得することができた一方で、実施可否の判断基準や海氷状況の監視体制など現場でのオペレーションとしては課題の多く残る結果となりました。
今回の出来事は複数の偶然が重なった稀有な回収事例となったのではないかと思います。MONACAチームリーダーの山縣隊員は回収後の取材で「運が良かったとしか言いようがない。今後の運用に活かすため、MONACAが持ち帰ったデータの解析を進めていきたい」と語りました。
(JARE67 池田未歩)