

撮影:JARE64 山口真一(2023年2月6日)
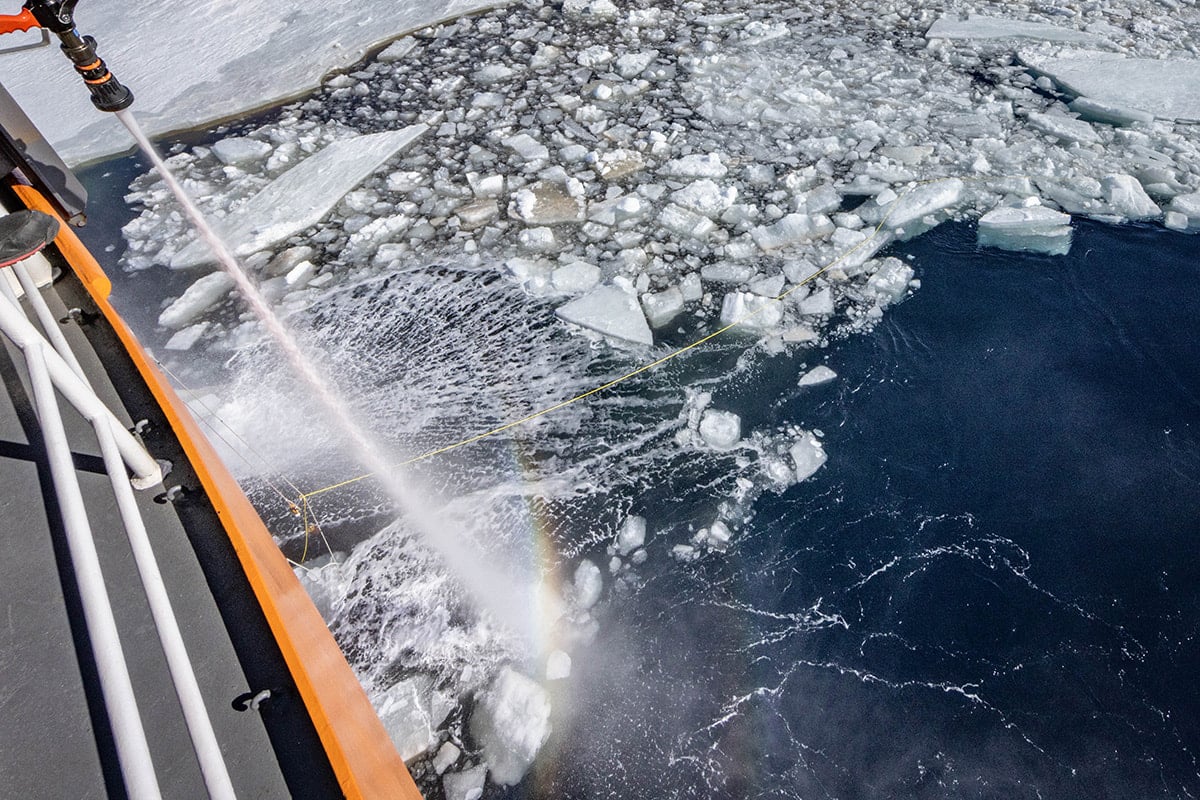
64次隊の海洋観測チームは、海水準上昇や気候システム変動の理解や予測のために、海が南極氷床をどのような仕組みで解かしているのかを研究しています。そのためには、氷と海が接する場所、つまり暖かい海が氷床末端の棚氷を底から融かす現場を調べる必要があるのですが、棚氷の下の海底地形や海の性質は衛星観測や砕氷船では調べることができません。そこで、氷下を診ることを可能にするAUV(Autonomous underwater vehicle、自律型水中ロボット)を駆使し、海氷下での運用試験から氷河棚氷下を目指しての観測を行います。
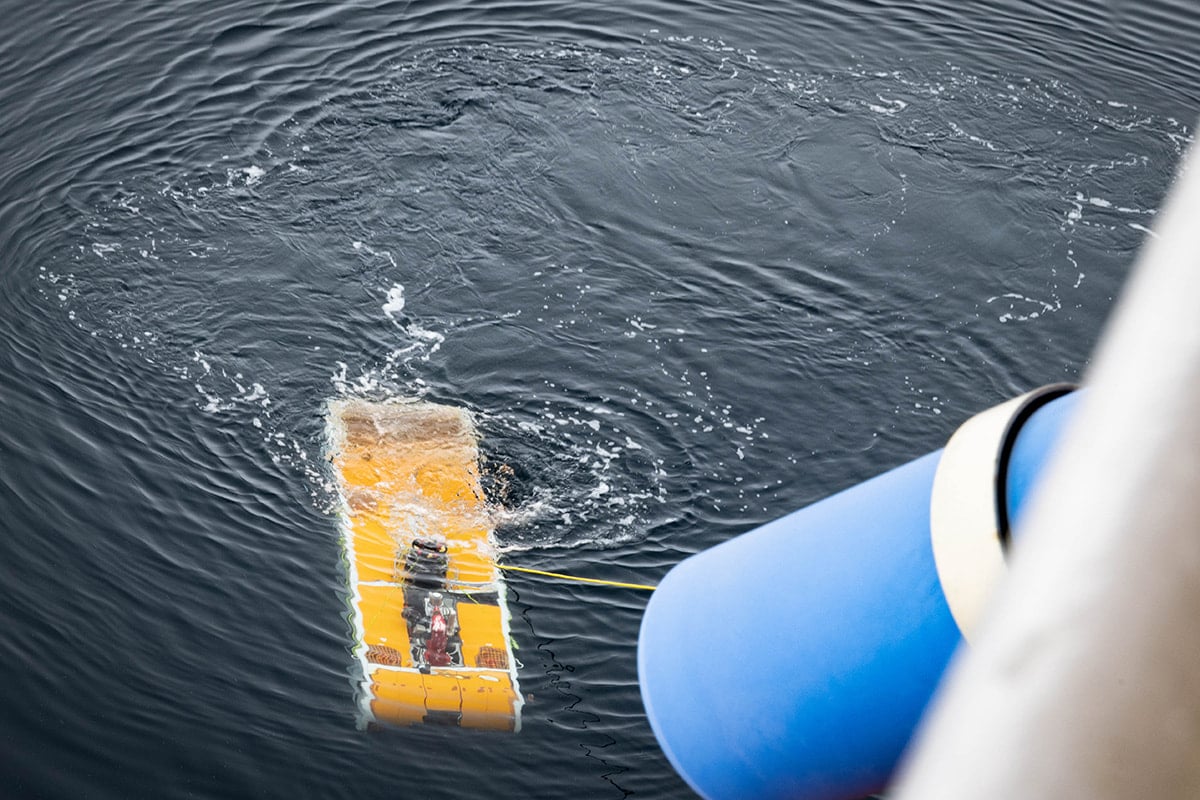
MONACAと名付けられたこのAUVは、2017年から5年の歳月をかけて開発されました。64次隊では、リュツォ・ホルム湾のラングホブデ沖に停泊している「しらせ」船上より日本初の南極海でのAUV観測を実施し、潜航20本、海氷下探査6回、海洋中層探査2回、海底地形探査5回、ラングホブデ氷河の棚氷縁辺観測1回を行い、2月10日に64次隊で計画されていたAUV観測はすべて終了しました。

撮影:JARE64 山口真一(2023年2月10日)
撮影:JARE64 山口真一(2023年2月6日)
MONACA開発者の山縣隊員は「仲間とともに育てたMONACAが南極で泳いだことを大変嬉しく思っています。南極では多くのトラブルや困難に見舞われましたが、山本隊員を始めとする、卓越したスキルを持った多くの仲間の協力を受けてなんとか終わることができました。MONACAは泳いだとは言え、まだまだ満足できない部分は多く、改善すべき課題は山積みです。MONACAが南極観測での一助となるため、今後さらなる改善を続けていきたいと思います。」と語りました。

撮影:JARE64 山口真一(2023年2月6日)

撮影:JARE64 山口真一(2023年2月6日)

撮影:JARE64 山口真一(2023年2月6日)

撮影:JARE64 山口真一(2023年2月10日)
またAUV観測の責任者である藤井隊員は「和製AUVによる南極の海の現場観測が叶い、嬉しく思います。一方で、目的としていた『氷河棚氷下の深海の観測』までは達成できなかったため、悔しい気持ちも入り交じった忘れられない観測となりました。今回のAUV観測は、エンジニア、サイエンティスト、観測技術者、『しらせ』乗員が束になって、南極の氷床融解という地球規模の課題に挑んだ貴重な機会であったなと肌で実感しています。この過程で得たノウハウは未来につながるものです。今回の観測で得られた海底地形や海水温、塩分などのデータは愛おしく、今後の解析がすごく楽しみです。人員異常なし、MONACA無事帰還、にまずは一安心ですが、この後も続くトッテン氷河などでの海洋観測に良い流れで切り替えていきたいと思います。」とプロジェクトの総括と今後の思いを語ってくれました。
撮影:JARE64 山口真一(2023年2月10日)

撮影:JARE64 山口真一(2023年2月10日)

撮影:JARE64 山口真一(2023年2月10日)
(JARE64 山口真一)