
早朝から「しらせ」は南へ進み、13時頃トッテン氷河沖の定着氷縁に到着。ここで1日停泊します。
停泊ポイントへの到着後すぐに、ROV(Remotely Operated Vehicle)の海氷下航行を行いました。ROVは海の中を自走できる小型の無人潜水艇で、ケーブルで船上と接続されており、撮影された映像をリアルタイムで見ながら操縦することができます。人が潜るには危険な海氷下の観測には有用なツールです。南極海での調査のために独自に改良されています。

撮影:JARE61 寺村たから、2019年12月12日

撮影:JARE61 寺村たから、2019年12月12日
今回、ROVには、水温や塩分など、海水の基礎データを測るセンサーや、音波で海氷の厚さを測るソナー、植物プランクトンの種類別の割合を計測するセンサー、光量子計(こうりょうしけい)が取り付けられています。光量子計はROVに届く光の量を測定し、船上での測定値と比較することで、海氷を透過する光の量と海氷厚の関係を調べます。
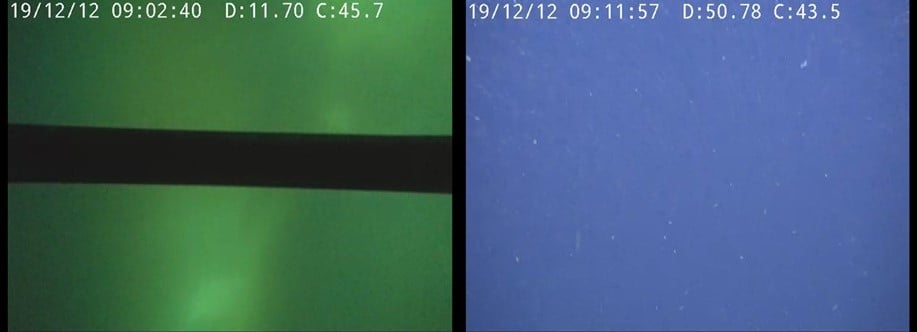
しらせ乗組員がROVを船尾から海に投入しました。ROVがしらせの後方へ進んでいくと、しらせ船内の「コンテナラボ」に備え付けられたディスプレイに映るROVからの映像は、明るい水色や、深い緑色、暗い青色、と変化していきました。

撮影:JARE61 寺村たから、2019年12月12日

撮影:JARE61 寺村たから、2019年12月12日

撮影:JARE61 寺村たから、2019年12月12日
1回目の航行では、潮に流されてROVが思わぬ方向に進んでいるというアクシデントがありましたが、2回目の航行では狙った方向に進めることができました。
明日もトッテン氷河沖での観測は続きます!
(JARE61 寺村たから)